Precision Sensing in Micro-Robotics: How Direct Laser Writing Enables Shape Sensing for Continuum Robots
Imagine a tiny, flexible robot navigating the winding, delicate pathways of the human circulatory system. To perform a life-saving surgery, this robot must know exactly how much it is bending and where its tip is located at every millisecond. If it cannot sense its own shape, it is essentially blind, risking damage to the very vessels it is meant to heal. This challenge of proprioception, or self-awareness of position, is the central hurdle in the field of soft and continuum robotics. Recent advancements in micro-scale manufacturing are beginning to bridge this gap, offering a way to print sensing capabilities directly into the very fabric of the robot. This breakthrough research, conducted by Amber K. Rothe, Nidhi Malhotra, and Jaydev P. Desai, explores the use of Direct Laser Writing to create highly precise, integrated shape-sensing systems that could redefine how flexible machines interact with their environment.
The Problem This Research Is Solving
Most industrial robots that we see in manufacturing plants are articulated, meaning they consist of rigid links connected by discrete, motorized joints. Measuring the position of such a robot is relatively straightforward; sensors called encoders can simply track the angle of each joint. However, continuum robots operate on a completely different principle. These are flexible, tentacle-like structures that move through continuous, smooth bending rather than sudden, angular movements. They are often inspired by biological organisms like elephant trunks or cephalopods.
While this flexibility allows them to navigate extremely complex and unpredictable environments, it creates a massive sensing problem. Because there are no discrete joints to measure, the robot has no inherent way of knowing its own curvature. Traditional methods for tracking shape often involve external tools, such as high-speed cameras or electromagnetic tracking systems. However, these external methods often lack the resolution needed for micro-scale robots, they can be blocked by tissue in medical settings, or they may be too bulky to work in confined spaces. To truly unlock the potential of continuum robots, we need a way to embed the sensors directly inside the robot's body without making the robot too stiff to bend or too large to fit through a needle.
The Key Idea in Plain English
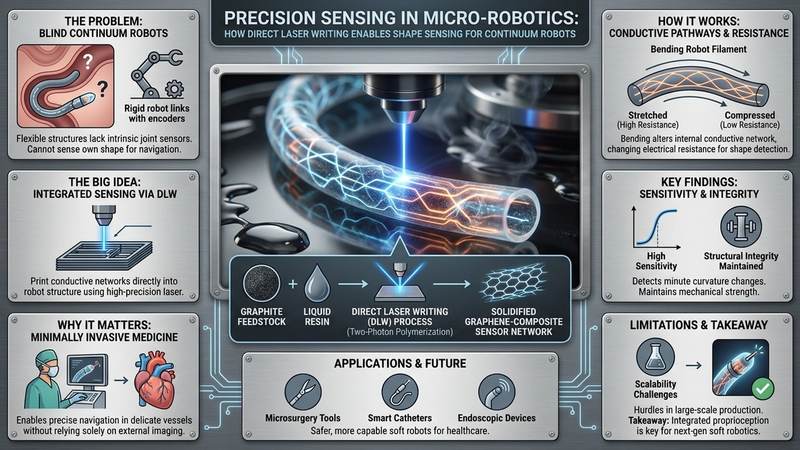
The solution proposed by the researchers involves a technique called Direct Laser Writing, which allows us to build incredibly small, complex structures one microscopic layer at a time. The core concept is to create a composite material that is both flexible and electrically conductive. By mixing tiny, conductive particles into a liquid resin and then using a high-precision laser to solidify that resin, we can print a sensor that is part of the robot's actual structure.
When the robot bends, the internal network of these conductive particles is stretched or compressed. This physical change alters the way electricity flows through the material. By measuring the change in electrical resistance, we can calculate exactly how much the robot has bent. This turns the entire body of the robot into a giant, continuous sensor. Instead of adding a bulky external sensor, we are essentially giving the robot a nervous system that is integrated into its very skin and muscle.
How the Graphene-Based System Works
To understand how this works, we must look at the physics of Two-Photon Polymerization, the process underlying Direct Laser Writing. In this method, a highly focused laser beam is directed into a container of specialized, light-sensitive liquid known as a photo-curable resin. Unlike standard 3D printing, which uses light to cure an entire layer, Two-Photon Polymerization uses the intensity of the light at a single, microscopic focal point to trigger a chemical reaction. This allows for a level of precision that is orders of magnitude higher than traditional printing, enabling the creation of structures at the sub-micron scale.
The magic happens when we introduce conductive fillers, such as graphene or carbon nanotubes, into that resin. When the laser creates the solid structure, these conductive particles become trapped within the polymer matrix, forming a complex, interconnected network. This network is designed to be right at the threshold of conductivity, a state known as the percolation threshold. At this threshold, the particles are close enough to allow electricity to flow through the material via electron tunneling or direct physical contact, but the network is not so dense that it ruins the flexibility of the polymer.
The mechanical-to-electrical conversion relies on the principle of piezoresistivity. When the continuum robot undergoes mechanical strain—meaning it bends or stretches—the distance between these conductive particles changes. As the polymer matrix deforms, the conductive network is disrupted or compressed. This change in the physical spacing between particles causes a measurable change in the electrical resistance of the material. Because the change in resistance is directly proportional to the amount of strain applied, we can use mathematical algorithms to translate those electrical signals back into a precise map of the robot's shape. This relies heavily on the interface between the conductive particles and the polymer; the chemistry of the resin must ensure that the particles are well-dispersed and that the connection between the particle and the polymer matrix is stable enough to provide consistent readings.
What the Researchers Found
The research highlights the immense capability of Direct Laser Writing to create functional, micro-scale sensing elements that are seamlessly integrated into flexible architectures. The findings suggest that by using these high-precision laser techniques, it is possible to achieve a high degree of sensitivity in shape sensing. This means the system can detect even minute changes in curvature, which is vital for delicate applications like microsurgery.
Furthermore, the study demonstrates that the structural integrity of the robot can be maintained while incorporating these conductive networks. One of the major hurdles in soft robotics is that adding conductive materials often makes the material too stiff, defeating the purpose of a flexible robot. However, the precision of the laser allows for the creation of specific, optimized geometries that balance the need for electrical conductivity with the requirement for mechanical flexibility. The research provides a pathway for creating robots that are not just flexible, but also highly "aware" of their own physical state.
Why the Result Matters
The implications of this research are profound, particularly for the field of minimally invasive medicine. Currently, surgeons often rely on real-time imaging, such as X-rays or ultrasound, to guide tools through the body. While effective, these methods can sometimes be imprecise or difficult to maintain during complex maneuvers. A catheter or endoscope equipped with integrated shape sensing would provide a continuous, high-resolution stream of positional data directly from the device itself.
Beyond medicine, this technology has massive potential in micro-scale industrial inspection. As machines become smaller and more complex, the need for tiny, flexible robots to inspect internal components—like micro-gears or small-scale fluidic channels—will grow. These robots need to navigate tight spaces and report back on their orientation to ensure they have successfully completed their task. The ability to print sensors directly into these micro-structures opens up a new frontier in autonomous micro-robotics.
Limitations and What Still Needs Testing
While the research is a significant step forward, there are several critical challenges that remain before this technology can be deployed in a hospital or a factory. First, Direct Laser Writing is a serial manufacturing process, meaning the laser must trace every single point of the structure. This makes it an incredibly slow process compared to mass-production methods like injection molding. Scaling this up to produce millions of medical catheters at a low cost is a significant engineering hurdle.
Second, the long-term stability of the sensing mechanism needs rigorous testing. In a biological environment, the robot will be exposed to fluids, changing temperatures, and varying pH levels. It is vital to ensure that the conductive particles do not leach out of the polymer and that the electrical properties of the material do not drift over time. Finally, the complexity of the data processing required to translate electrical resistance into a 3D shape model is high. Developing robust, real-time algorithms that can handle the complex non-linearities of piezoresistivity will be essential for practical, real-world use.
Real-World Applications
The most immediate application for this technology is in the development of next-generation medical catheters. These devices are used to navigate the complex, twisting pathways of the heart and blood vessels. With integrated shape sensing, a surgeon could have much higher confidence in the position of the catheter tip, reducing the risk of vessel perforation and allowing for more precise delivery of drugs or surgical tools.
In the industrial sector, this could lead to the creation of micro-bots for inspecting micro-electromechanical systems (MEMS). As we move toward even smaller electronics, we will need tiny robots capable of navigating through the internal structures of a chip to detect cracks or manufacturing defects. These robots would require the same level of high-precision shape sensing to ensure they do not become lodged or damaged during the inspection process.
If You Remember One Thing
If you remember only one thing from this research, let it be this: we are moving toward a future where robots are no longer just machines with sensors attached to them, but are instead "smart materials" where the sensing capability is an intrinsic part of their very structure, printed with light.
FAQ
How do these robots actually feel their shape? These devices utilize a property known as piezoresistivity, which is a change in electrical resistance that occurs when a material is subjected to mechanical strain. When the robot bends, the internal conductive network is distorted, and the resulting change in electrical signal can be translated back into a mathematical model of the robot's position.
Why is Direct Laser Writing used instead of regular 3D printing? Direct Laser Writing, specifically through Two-Photon Polymerization, offers sub-micron precision that standard 3D printing cannot match. This precision is necessary to create the microscopic, interconnected networks of conductive particles required for accurate sensing at the micro-scale.
Can the conductive particles be anything? While various conductive fillers can be used, the success of the sensor depends on achieving the percolation threshold, where the particles form a continuous electrical path through the polymer without making the material too stiff. The choice of material affects the sensitivity and the mechanical flexibility of the robot.
Is this technology ready for medical use right now? Not quite yet. While the research shows a clear pathway, the technology still needs to undergo extensive testing regarding its biocompatibility, its durability in biological fluids, and the speed at which it can be manufactured for large-scale use.
What is the main benefit of a continuum robot over a traditional one? Continuum robots are much more flexible and can navigate through winding, irregular paths that would be impossible for a rigid-jointed robot. This makes them ideal for tasks in medicine and micro-scale inspections where maneuverability is more important than raw strength.
Conclusion
The work by Amber K. Rothe, Nidhi Malhotra, and Jaydev P. Desai represents a pivotal shift in how we approach the design of flexible machines. By leveraging the extreme precision of Direct Laser Writing, they have demonstrated that we can move beyond external sensing and instead create robots that possess an inherent, integrated sense of their own form. As we refine these micro-manufacturing techniques and solve the challenges of scalability and stability, the era of truly intelligent, self-aware soft robots is rapidly approaching, promising to revolutionize everything from the operating room to the micro-factory.
Evaluate Our Quality
Serious about B2B integration? Test our premium Pulsed Electrical Resistive Carbon Heating turbostratic graphene in your lab. 100g sample packs available now.